“The art of progress is to preserve order amid change and to preserve change amid order.”
— Alfred North Whitehead

“The art of progress is to preserve order amid change and to preserve change amid order.”
— Alfred North Whitehead
[And please click here for a Presentation on Autonomous Intelligent Control and Tactical Behavior]
While there are many approaches to designing control system architectures for complex systems, the 4D/RCS is more advanced than other intelligent control system architectures – and it has been demonstrated and proven in a multiplicity of applications and test-beds. (The “4D” represents the four dimensions of space and time, while the “RCS” is an abbreviation for Real-time Control System).
The 4D/RCS is a framework in which sensors, sensor processing, databases, computer models, and machine controls may be linked and operated such that the system behaves as if it were intelligent. It can provide a system with several types of intelligence (where intelligence is the ability to make an appropriate choice or decision):
(1) Reactive intelligence based on an autonomic sense-act modality which is the ability of the system to make an appropriate choice in response to an immediate environmental stimulus (i.e., a threat or opportunity). Example: the robot moves toward a person sensed by optical image processing.
(2) Deliberative intelligence, which includes prediction and learning, which is based on world models, memory, planning, and task decomposition, and includes the ability to make appropriate choices for events that have not yet occurred but which are based on prior events. Example: the vehicle moves toward a person, which it recognizes as an enemy soldier, to kill or capture him before he can harm friendly forces.
(3) Creative intelligence, which is based on learning and the ability to cognitively model and simulate and it is the ability to make appropriate choices about events which have not yet been experienced. Example: from a chance encounter with an enemy civilian with a weapon, the vehicle learns that enemy civilians can be dangerous and it must develop appropriate tactics to respond to the danger.
The 4D/RCS was developed over the last 30 years by the Intelligent Systems Division (ISD) of the National Institute of Standards and Technology (NIST), an agency of the U.S. Department of Commerce, and more than $125 million was invested in it by the U.S. government. The 4D/RCS had its origins in early work by Dr. James Albus on neuro-physiological models and adaptive neural networks, and it was originally designed to control manufacturing facilities. It has since been modified and adapted for robotic vehicles, including autonomous underwater vehicles and robotic ground vehicles. It served as the reference model architecture for the NASA space station and for the Army’s Demo I, II, and III Programs, and it was successfully demonstrated autonomously driving robotic ground vehicles on roads and cross-country. With additional funding of $250 million, the 4D/RCS was specified as the intelligent controlarchitecture, in the Autonomous Navigation System (ANS) Program, for the Army’s Future Combat System (FCS).
The 4D/RCS architecture is a framework in which to place, connect, and activate the intelligence of complex systems. It is a generic intelligent control system, where the user can specify the level of control to range from teleoperation to supervised autonomy to full autonomy, for robots or other systems. For example, a weapons mission may require a man-in-the-loop for supervised autonomy, while reconnaissance, surveillance, and target acquisition (RSTA) mission may permit full autonomy. The 4D/RCS can be designed to permeate a system or a system of systems (such as the FCS), controlling individual or multiple platforms, sensors, and weapons. The systems may be fully autonomous, or human supervisors can interface with the 4D/RCS in a number of ways via communications and command and control links. The 4D/RCS can also interact with distant databases, machines, and control centers.
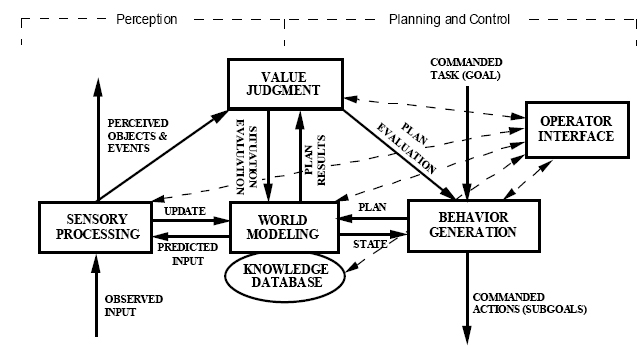
The 4D/RCS can perform complex real-time tasks in the presence of sensory or other information input. It can decompose high-level goals into low-level actions, making real-time decisions in the presence of noise and conflicting demand for resources. It provides a framework for linking artificial intelligence techniques with real-time control in a rapidly changing environment. The 4D/RCS provides interfaces for sensors or incoming information to controls through a hierarchically structured, real-time, world model, as shown in Figure 1. The world model integrates current data with a priori knowledge to provide the control system with a current best estimate of the state of the world. One side of the 4D/RCS focuses on perception (sensory input and processing), while the other side focuses on planning and control. An operator interface – and the amount of operator supervision - is optional. The functional elements of an intelligent system are appropriate behavior generation (planning and control), sensory processing (filtering, detection, recognition, grouping), world modeling (store and retrieve knowledge and predict future states), and value judgment (compute cost, benefit, importance, and uncertainty). These are supported by a knowledge database and a communications system that interconnects the functional processes and the knowledge database. This collection of processes and their interconnection form a generic node in the 4D/RCS reference model architecture.
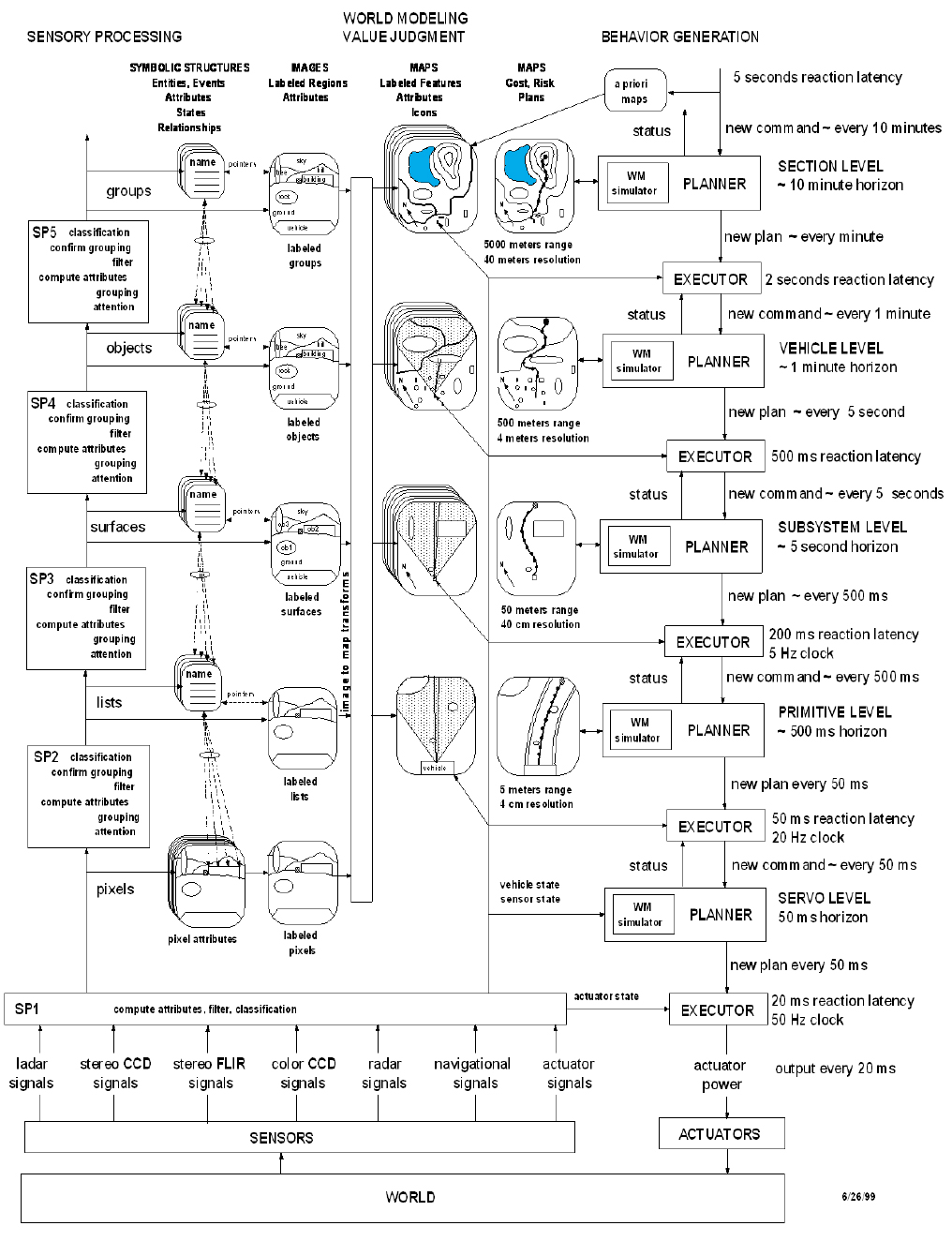
As shown in Figure 2, the 4D/RCS may be decomposed into several hierarchical levels (typically six to eight levels). Each control level receives input commands from a higher level (or in the case of the top level, from outside the system), sensory (or other information) feedback, and status feedback from the next lower control level. Each control level provides output commands to the next lower level and status reports to the next higher level. Each level receives appropriate sensory data, making it a sensory-interactive control architecture.
There are actually several hierarchies in the 4D/RCS. An organizational hierarchy with a single chain of command has a complex task controlled within a computational hierarchy, itself consisting of three parallel hierarchies: sensory processing, world model, and task decomposition.
The sensory processing (SP) hierarchy consists of a series of computational units (e.g., SP1 to SP5 in the figure), each of which extract the particular features and information patterns needed by the task decomposition unit at that level. Feedback from the sensory processing hierarchy enters each level of the task decomposition hierarchy. This feedback comes from the same or lower levels of the hierarchy or from the external environment. It is used by the modules in the task decomposition hierarchy to sequence their outputs and to modify their decomposition function so as to accomplish the higher-level goal in spite of perturbations and unexpected events in the environment.
The world hierarchy consists of modules which model (remember, estimate, and predict) and evaluate the state of the system's world. It contains knowledge bases with information on state variables, maps, lists of objects and events, and attributes of objects and events. The world model is the system's best estimate and evaluation of the history, current state, and possible future states of the world.
Behavioral task decomposition means that each level in the computational hierarchy generates a plan leading to an executor ordering the corresponding behavior in the system being controlled (e.g., a robot or weapon or decision-aide display). As illustrated in Figure 2 (designed for a robotic vehicle application), the planning horizon is longer at the higher levels (e.g., 10 minutes or 10 hours) than the lowest levels of the hierarchy (e.g., 20 msec or less), and the plan's resolution or detail is lower at the higher levels. For example, if the top level wants to move in the sequence “ABCD,” then “AB” must first be achieved, which requires that “A” be performed, which requires (for example) that the system achieve state “A”, which requires that a certain mechanism be activated. The cycle time at the lower levels is much shorter than at the higher levels (e.g., milliseconds versus hours).
The world model is a best estimate of the state of the world, including the state of the control system itself. Task modules at the same level shared information about the state of the world, but different levels access different parts of the world model. Expert systems (i.e., symbolic or rule-based systems) may reside at the top two or three levels. The bottom level makes use of conventional control theory to operate variables of suitable mechanisms (e.g., wheels, propellers, or servos). The top of the hierarchy can accommodate programs for achieving cooperative behavior among several autonomous vehicles, but a single vehicle can also be accommodated. The world model is closely coupled to the value judgment module, which determines and updates priorities.
The mission planner develops the strategy for a mission, such as the detection of an asymmetric threat; it may also determine the goals of the mission, or the goals may come from outside the system. The planning horizon may be minutes or hours at the top level, but grows progressively shorter as the plan is decomposed at successively lower levels.
The strategy, for many groups of subsystems, becomes a tactical plan for a single group at level 4. This becomes a tactical plan for a single subsystem at level 3, which is further decomposed into specific behaviors (such as states needed to be achieved to satisfy the level 3 plan) at level 2 are computed at level 1, and the specific physical values (voltage, flap angles, propeller speeds – or output displays of perceived threats and recommended courses of action) are computed at level 0 as input to the appropriate actuators.
Detection, indications, and warnings, critical for anticipating, detecting, and recognizing threats and opportunities, depend on data and information from sensors, databases, and human intelligence (HUMINT). The 4D/RCS can accommodate any type of data input. Sensory processing is typically performed within the context of a task assigned to a behavior generation process at the same level. Sensing leads to perception as processing proceeds up the hierarchy, and goals lead to actions as processing proceeds down the hierarchy. As in human bureaucracies, there is increasing scope and decreasing resolution moving up the hierarchy, but increasing detail and decreasing time horizon moving down the hierarchy. Human hierarchies are necessary to achieve large and complex tasks, from building the pyramids and cathedrals to voyaging to the moon. Likewise, intelligent machines can manage complexity through hierarchical architecture.